
Sets of points satisfying certain geometric condition are ubiquitous in Mathematics. The simplest examples are straight lines, circles and more general conics. Thus a straight line can be defined as the set of points equidistant from two given points, a circle as the set of points whose distance to a fixed point (center) is constant and a conic as the set of points such that the ratio of the distances to a given point (focus) and a given line (directrix) is constant. The type of conic depends on whether the ratio (called eccentricity) is less, equal or greater than one.
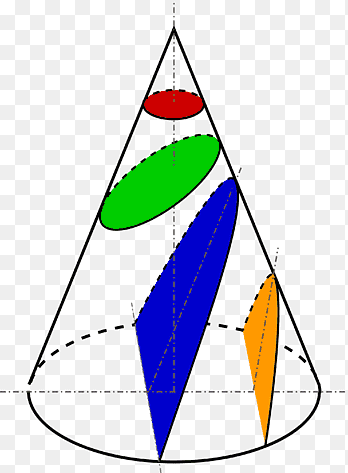
Straight lines and circles were intensively studied since antiquity. They were the favorite objects of Greek geometers, and their properties are thoroughly investigated in Euclid’s Elements. In his fundamental treatise “Conics”, Apollonius of Perga, known as the “Great Geometer”, went further, tackling a systematic study of conics, establishing their focal properties, as well as those of chords and tangents, “conjugate” diameters, asymptotes, etc. It is believed that he heavily drew from previous work by Euclid as well as from Menaechmus, who is generally considered the discoverer of conic sections.
Greeks did not stop there. For the purpose of solving construction problems not amenable to the straightedge and the compass, they introduced more sophisticated loci like conchoids and cissoids, and “kinematic” curves like the quadratrix or the Archimedean spiral.
When the method of coordinates was introduced by Fermat and Decartes in the XVII century, the sophisticated auxiliary constructions typical of synthetic geometry were replaced by more straightforward and systematic algebraic methods. The equations of the above mentioned curves were obtained right away by expressing their defining properties in the language of Algebra. For instance, a parabola is a conic with eccentricity 

for a parabola with focus at 

Yet another locus, also considered by the Greeks, is that of points such that the ratio of their distances to two given points is constant. Using coordinates, one easily arrives at the equation of a circle (or a line if the ratio is equal to one). These are the so called Apollonian circles. They appear in applications, for instance as the zero-potential line for a system of two point charges in Electrostatics.
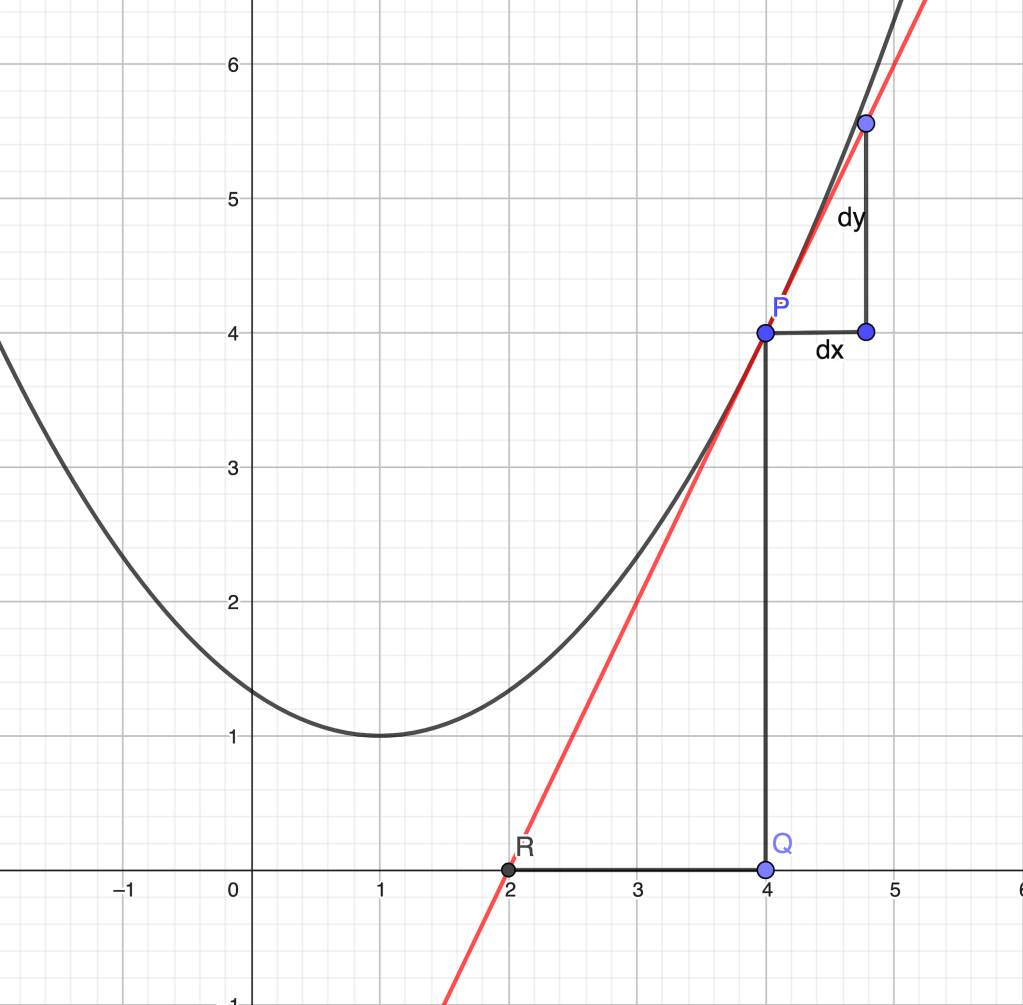
In the previous examples, the property defining the curve could be directly translated into a finite algebraic relation between the coordinates. With the birth of Calculus other classes of curves started to draw the attention of scholars, namely those whose defining property was more “local” in nature, in the sense that it involved the direction or some other feature of the curve at each point. In those cases, the defining property is not a finite, but rather a differential equation, relating 
The consideration of the “differential triangle” with sides 
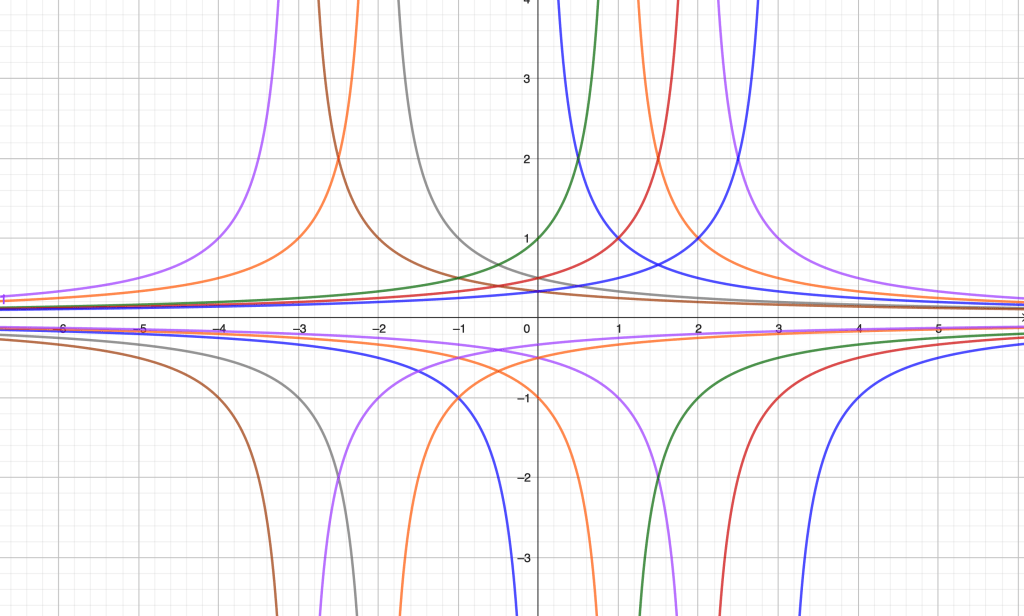
A family of equilateral hyperbolas
Consider the locus of points on the 

Let the generic point be 


Since 



and, consequently

The given condition then reads

or

The expression on the left is a total differential,

giving a general solution of the form

which is a family of equilateral hyperbolas with common asymptote 

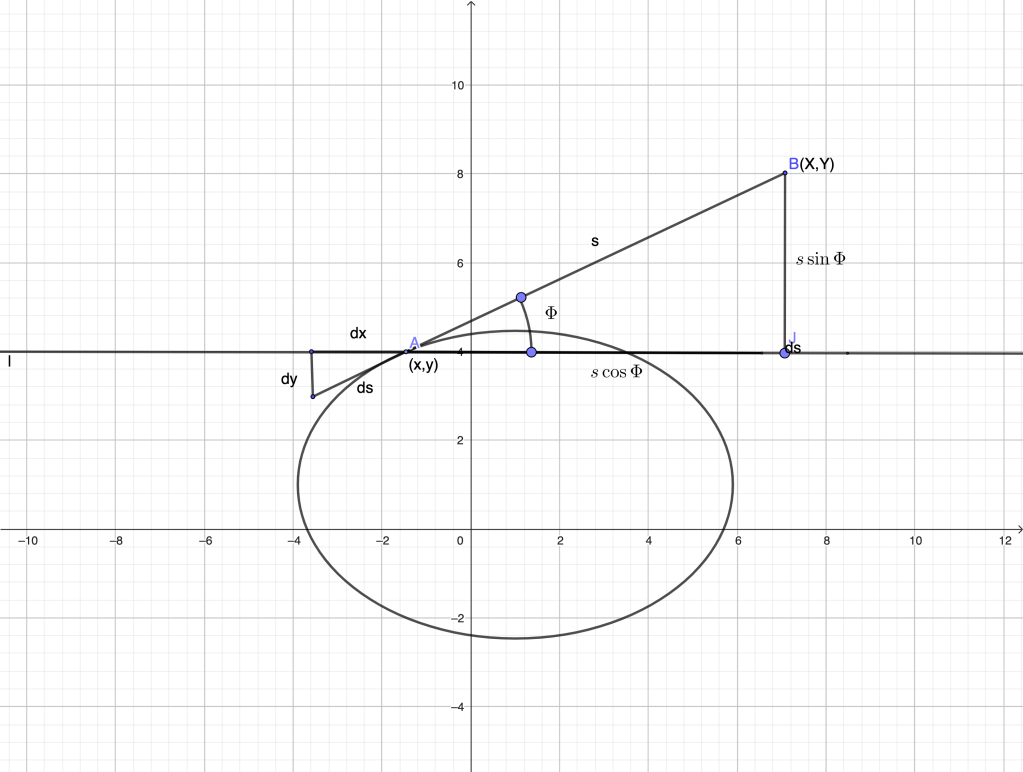
The tractrix
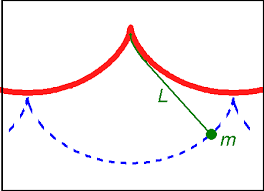
The following problem was proposed by Claude Perrault in1670, solved in 1692 by Huygens and subsequently solved by Leibniz, Johann Bernoulli and others.
“What is the path of an object dragged along a horizontal plane by a string of constant length when the end of the string not joined to the object moves along a straight line in the plane?”
Obviously, if the object is initially on the line of the force, the path is just a line. Assume it is not. For simplicity, choose the 


In the figure, 




The condition to be satisfied is 
The triangle

thus implying

The condition 

equivalent to two differential equations,

Direct integration (say, by setting 


corresponding to an upper branch with negative slope (puller moving up) and a lower branch with positive slope (puller moving down). The branches meet at the initial point
As it happens, if a tractrix is rotated about the asymptote, the obtained surface is a pseudosphere, whose Gaussian curvature is a negative constant (just like the Gaussian curvature on a sphere is a positive constant). The local geometry on a pseudosphere is hyperbolic, as shown by E. Beltrami.
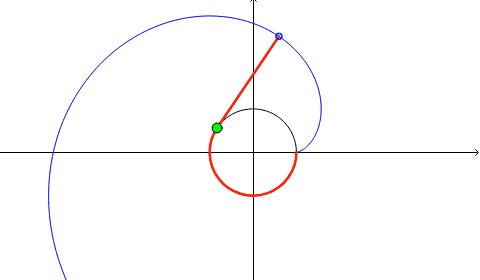
Involutes
Some curves are generated from others. An involute (also called evolvent) of a curve is the locus of the tip (or any other point) on a piece of taut string as the string is either unwrapped from or wrapped around the curve. Involutes were first studied by Huygens in 1673, particularly those of a cycloid, as part of his study on isochronous pendula. There are infinitely many involutes to a given curve, depending on the point where the tip of the string detaches from it, and also depending on the direction of the wrapping/unwrapping. In the figure below, an involute to a given circle is represented in blue color. Any other involute is obtained by rotation/reflection about a line through the origin.
Let us derive the equation of the involute of a general regular curve 

where regularity means 







We have

where 
On the other hand, from the differential triangle we see that

In terms of derivatives, we conclude

In the generał case,

For a circle of unit radius, parametrized as 



The involutes of a circle are used in the design of gear teeth, see https://www.marplesgears.com/2019/10/an-in-depth-look-at-involute-gear-tooth-profile-and-profile-shift/
Evolutes
Huygens also proved that the locus of the centers of curvature of any involute is the original curve, called the evolute. Huygens and his contemporaries defined the center of curvature as the “point of intersection of two infinitesimally close normals”. Nowadays we would say: ” the center of curvature is the center of the osculating circle”. This conceptual shift clearly shows the transition from a more dynamic to a more static point of view which runs in parallel with the abandonment of infinitesimals.
For algebraic curves, the osculating circle can be found by purely algebraic methods. Indeed, the osculating circle is the unique circle having order of tangency at least two with the curve at the given point. That was the method employed by Descartes. As Johann Bernoulli pointed out, this procedure breaks down for transcendental curves and has to be replaced by a more flexible method based on infinitesimal calculus.
I reproduce below Bernoulli’s derivation of a formula for the radius of the osculating circle (radius of curvature) as a function of 


Let 





















First, we observe that triangles 






Writing 

Using the triangle similarities mentioned above,



Putting all together,

Taking into account that our figure assumes 


At points where 

If the original curve is given in parametric form, 



leading to the formula

where now derivatives are taken with respect to the parameter
Compared with a modern derivation, the one above may rightfully seem a bit clumsy and lacking a systematic approach. It is more of an art; the art of recognizing quantities that can be disregarded in the pre-limit situation. However, apart from that, it is impressive how little is actually needed to get the formula. Just similarity of triangles!
Once we have a formula for the radius of curvature, deriving the equation of the evolute of a generic curve is straightforward. We obtain the point 



The formulas obtained allow to easily prove Huygens’ claim: a given curve is the evolute of any of its involutes. As a consequence, the evolute is the envelope of the family of normals of any of its involutes.
Involutes have cusps at the point where the string detaches from the curve. Evolutes have cusps at points corresponding to maximum/minimum curvature.
Some examples of involute/evolute pairs are: tractrix/catenoid, parabola/semicubic parabola, ellipse/(stretched) astroid, logarithmic spiral/(another) logarithmic spiral, &c.
A series of videos showing several involute/evolute pairs and how they are generated can be found here https://kmr.dialectica.se/wp/research/math-rehab/learning-object-repository/geometry-2/metric-geometry/euclidean-geometry/geometry/plane-curves/evolutes/
